Featured Projects
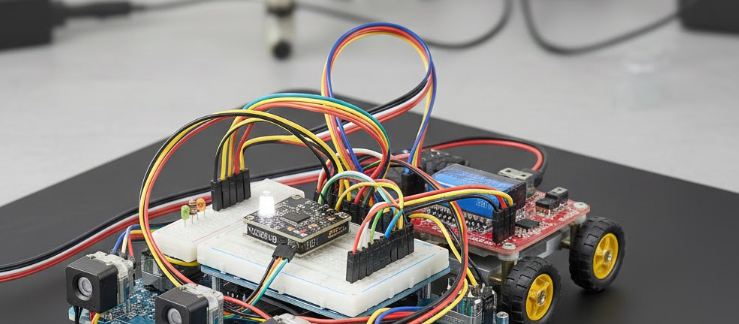
Autonomous Robot
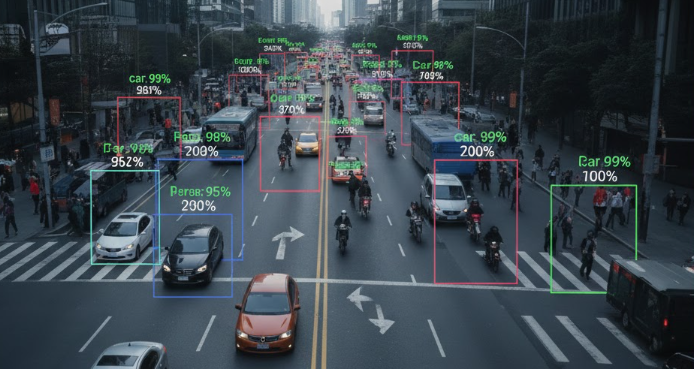
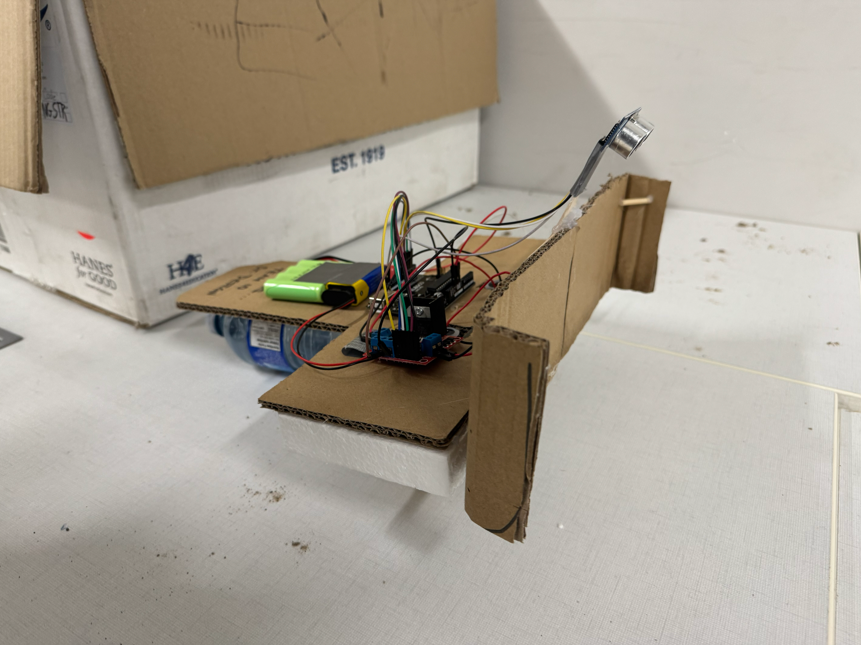
A sophisticated robotics project that navigates predetermined routes autonomously, detects bus stops using computer vision, follows traffic lights, and makes real-time decisions based on environmental sensing. Demonstrates advanced robotics, sensor fusion, and AI decision-making.
Key Technologies:
Key Features:
- ✓ Autonomous navigation with waypoint following
- ✓ Real-time traffic light detection and interpretation
- ✓ Bus stop recognition and stopping behavior
- ✓ Obstacle avoidance with sensor arrays
- ✓ Decision-making AI system
Status: Completed | Timeframe: 2020-2021
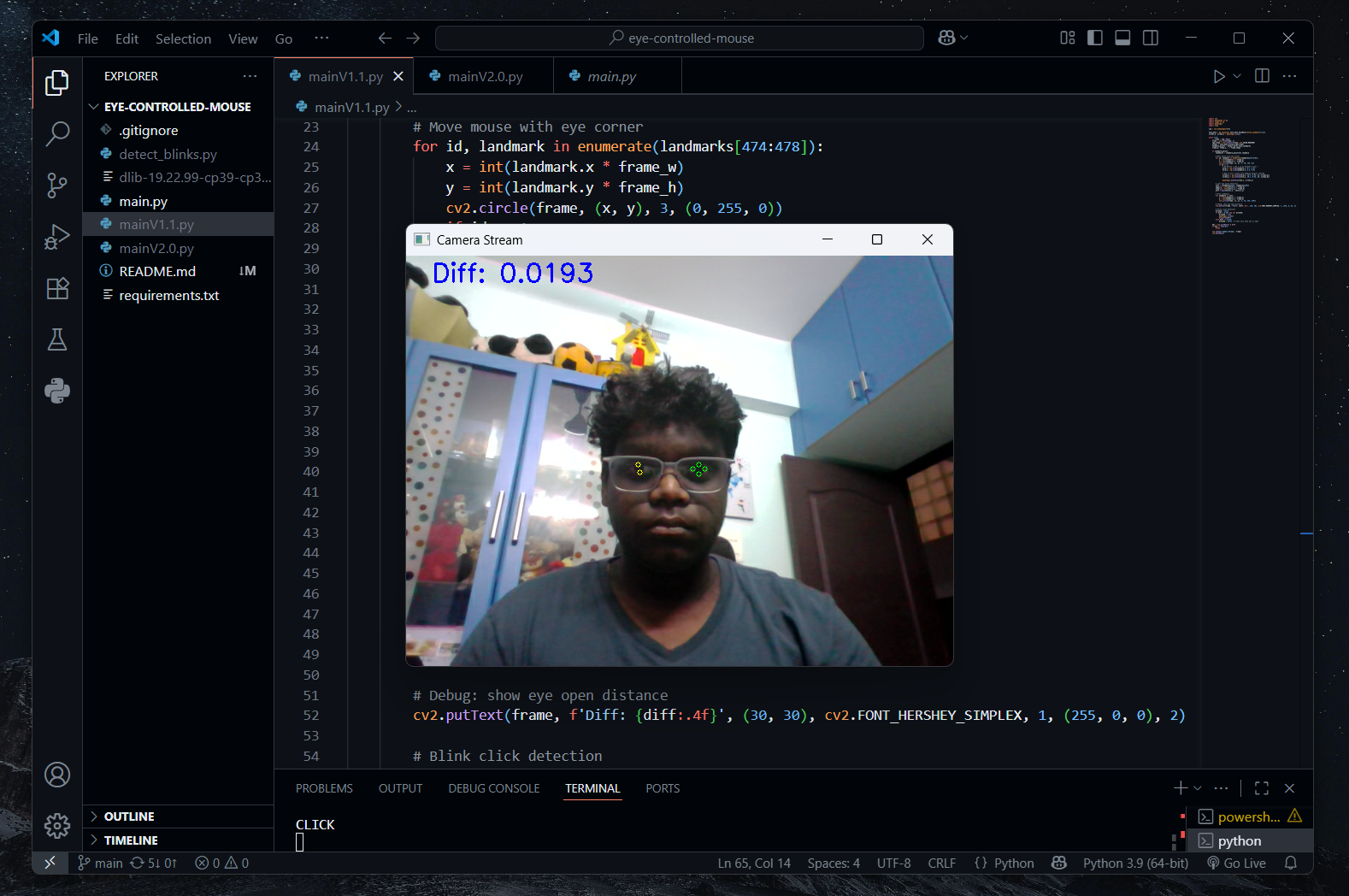
Vision Mouse
Eye-tracking powered cursor control system that uses MediaPipe for real-time facial landmark detection. Features automatic calibration without manual tuning, allowing users to control their computer cursor through eye movement alone. Ideal for accessibility and hands-free interaction.
Key Technologies:
Key Features:
- ✓ Real-time eye detection and tracking
- ✓ Automatic calibration (no manual setup)
- ✓ Smooth cursor movement with acceleration
- ✓ Click detection through blink recognition
- ✓ High accuracy and responsiveness
Status: Completed | Timeframe: 2024
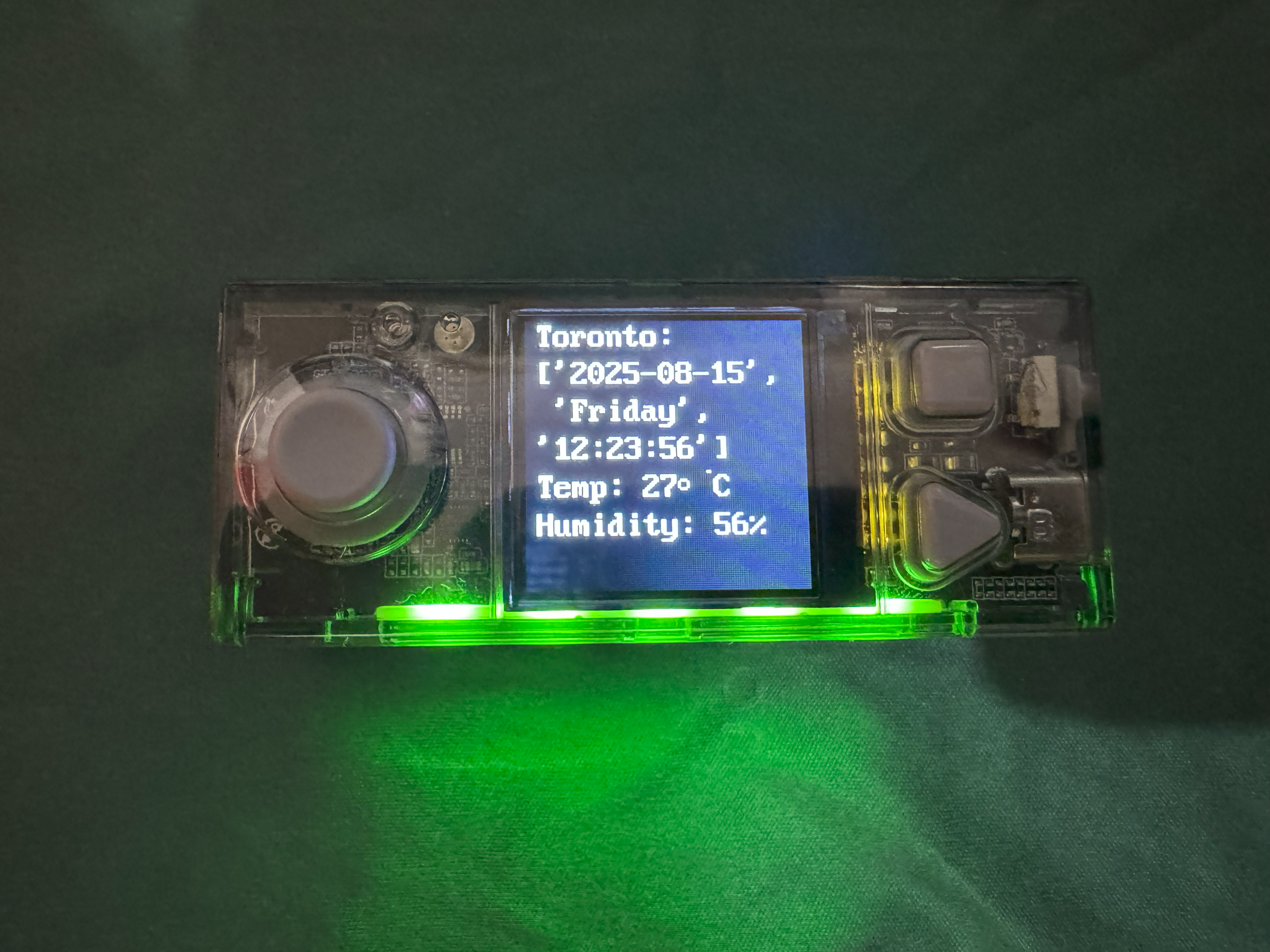
Weather Collector
IoT weather station powered by CyberPi microcontroller. Collects real-time environmental data including temperature, humidity, and atmospheric pressure. Data is processed locally and can be integrated with cloud services for long-term monitoring and analysis.
Key Technologies:
Key Features:
- ✓ Multi-sensor data acquisition
- ✓ Real-time environmental monitoring
- ✓ Cloud integration for data storage
- ✓ Local data logging and analysis
- ✓ Custom calibration capabilities
Status: Completed | Timeframe: 2024
Fin McMissile
Next project under development
Upcoming Project
Working on the next exciting project that combines multiple technologies and showcases advanced problem-solving techniques. Details and demonstrations coming soon!
Potential Technologies:
Coming Features:
- ✓ More details coming soon
Status: In Development